#include <sim_events.hh>
|
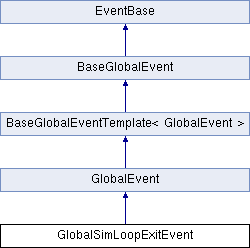
| typedef BaseGlobalEventTemplate< GlobalEvent > | Base |
| |
| typedef int8_t | Priority |
| |
| static const Priority | Minimum_Pri = SCHAR_MIN |
| | Event priorities, to provide tie-breakers for events scheduled at the same cycle. More...
|
| |
| static const Priority | Debug_Enable_Pri = -101 |
| | If we enable tracing on a particular cycle, do that as the very first thing so we don't miss any of the events on that cycle (even if we enter the debugger). More...
|
| |
| static const Priority | Debug_Break_Pri = -100 |
| | Breakpoints should happen before anything else (except enabling trace output), so we don't miss any action when debugging. More...
|
| |
| static const Priority | CPU_Switch_Pri = -31 |
| | CPU switches schedule the new CPU's tick event for the same cycle (after unscheduling the old CPU's tick event). More...
|
| |
| static const Priority | Delayed_Writeback_Pri = -1 |
| | For some reason "delayed" inter-cluster writebacks are scheduled before regular writebacks (which have default priority). More...
|
| |
| static const Priority | Default_Pri = 0 |
| | Default is zero for historical reasons. More...
|
| |
| static const Priority | DVFS_Update_Pri = 31 |
| | DVFS update event leads to stats dump therefore given a lower priority to ensure all relevant states have been updated. More...
|
| |
| static const Priority | Serialize_Pri = 32 |
| | Serailization needs to occur before tick events also, so that a serialize/unserialize is identical to an on-line CPU switch. More...
|
| |
| static const Priority | CPU_Tick_Pri = 50 |
| | CPU ticks must come after other associated CPU events (such as writebacks). More...
|
| |
| static const Priority | CPU_Exit_Pri = 64 |
| | If we want to exit a thread in a CPU, it comes after CPU_Tick_Pri. More...
|
| |
| static const Priority | Stat_Event_Pri = 90 |
| | Statistics events (dump, reset, etc.) come after everything else, but before exit. More...
|
| |
| static const Priority | Progress_Event_Pri = 95 |
| | Progress events come at the end. More...
|
| |
| static const Priority | Sim_Exit_Pri = 100 |
| | If we want to exit on this cycle, it's the very last thing we do. More...
|
| |
| static const Priority | Maximum_Pri = SCHAR_MAX |
| | Maximum priority. More...
|
| |
| typedef unsigned short | FlagsType |
| |
| typedef ::Flags< FlagsType > | Flags |
| |
| | BaseGlobalEventTemplate (Priority p, Flags f) |
| |
| static const FlagsType | PublicRead = 0x003f |
| |
| static const FlagsType | PublicWrite = 0x001d |
| |
| static const FlagsType | Squashed = 0x0001 |
| |
| static const FlagsType | Scheduled = 0x0002 |
| |
| static const FlagsType | Managed = 0x0004 |
| |
| static const FlagsType | AutoDelete = Managed |
| |
| static const FlagsType | Reserved0 = 0x0008 |
| | This used to be AutoSerialize. More...
|
| |
| static const FlagsType | IsExitEvent = 0x0010 |
| |
| static const FlagsType | IsMainQueue = 0x0020 |
| |
| static const FlagsType | Initialized = 0x7a40 |
| |
| static const FlagsType | InitMask = 0xffc0 |
| |
Definition at line 52 of file sim_events.hh.
◆ GlobalSimLoopExitEvent() [1/2]
| GlobalSimLoopExitEvent::GlobalSimLoopExitEvent |
( |
Tick |
when, |
|
|
const std::string & |
_cause, |
|
|
int |
c, |
|
|
Tick |
repeat = 0 |
|
) |
| |
◆ GlobalSimLoopExitEvent() [2/2]
| GlobalSimLoopExitEvent::GlobalSimLoopExitEvent |
( |
const std::string & |
_cause, |
|
|
int |
c, |
|
|
Tick |
repeat = 0 |
|
) |
| |
◆ description()
| const char * GlobalSimLoopExitEvent::description |
( |
| ) |
const |
|
virtual |
◆ getCause()
| const std::string GlobalSimLoopExitEvent::getCause |
( |
| ) |
const |
|
inline |
◆ getCode()
| int GlobalSimLoopExitEvent::getCode |
( |
| ) |
const |
|
inline |
◆ process()
| void GlobalSimLoopExitEvent::process |
( |
| ) |
|
|
virtual |
◆ cause
| std::string GlobalSimLoopExitEvent::cause |
|
protected |
◆ code
| int GlobalSimLoopExitEvent::code |
|
protected |
◆ repeat
| Tick GlobalSimLoopExitEvent::repeat |
|
protected |
The documentation for this class was generated from the following files:
 Public Member Functions inherited from GlobalEvent
Public Member Functions inherited from GlobalEvent